디지스트 로봇공학전공 최홍수 교수팀 세계최초 개발
짚신벌레 섬모운동 모방 노 젓기 식 추진력 얻어
혈액 등 점성 높은 유체 환경 추진효율 뛰어나

단세포 생물인 짚신벌레의 섬모운동처럼 추진력을 얻는 섬모 마이크로로봇이 대구경북과학기술원(DGIST, 디지스트) 연구팀에 의해 세계 최초로 개발됐다.
기존의 마이크로로봇보다 속도가 훨씬 빨라 몸 속 특정 부위에 약물이나 세포를 전달, 진단ㆍ치료하는데 효율적으로 사용할 수 있을 것으로 기대된다.
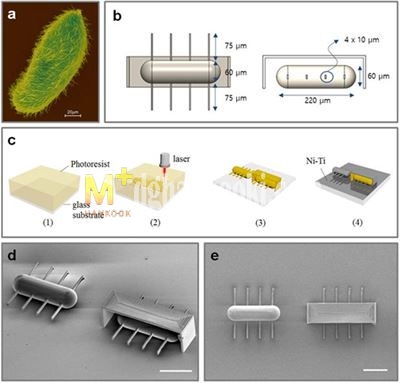
디지스트는 이 대학 로봇공학전공 최홍수 교수 연구팀이 초미세 3차원 가공기술과 앞뒤, 상하 등 비대칭적 자기장 구동기술을 이용해 이론적으로만 알려진 짚신벌레의 섬모운동을 적용한 마이크로로봇을 세계 최초로 개발했다고 2일 밝혔다.
최 교수팀에 따르면 사람 몸 속처럼 점성이 높은 환경에서 마이크로로봇이 추진력을 가지려면 일반적인 방법으론 어려워 미생물의 나사선 추진운동이나 진행파동형운동, 섬모의 비대칭적 왕복운동 등의 추진법을 응용한다. 지금까지 나사선 추진운동이나 진행파동형운동을 응용한 방법은 스위스, 네덜란드, 미국 등 선진국 대학에서 구현하는데 성공했으나 섬모운동을 활용한 것은 이번이 처음이다.
최 교수팀이 제작한 로봇은 머리카락 굵기(평균 100㎛) 2배 가량인 길이 220㎛, 높이 60㎛로, 최대 속도는 초속 340㎛로 기존에 자기장을 이용해 끄는 방식의 마이크로로봇보다 8.6~25.8배나 빠르다. 몸통 좌우 섬모 끝에 금속을 코팅, 몸 속에 투입한 뒤 외부에서 자기장을 가해 섬모가 움직이도록 해 추진력을 얻게 된다. 이 로봇은 레이저를 쪼인 부분만 딱딱해지는 광경화성폴리머라는 소재에 3차원 레이저공정기술 및 정밀 금속 코팅기술을 이용해 니켈과 티타늄을 코팅하는 방식으로 제작했다.
자기장을 이용한 실험에서도 자유롭게 방향도 전환할 수 있고, 직경 80㎛ 크기의 둥근 물체를 밀어서 목표 지점에 전달하는데 성공했다.
최홍수 교수는 “지금까지 하지 못한 섬모의 비대칭적 왕복운동을 모방한 마이크로로봇을 정밀 3차원 제작기술 및 자기장 제어 기술을 통해 개발했다”며 “기존의 자기장끌림 마이크로로봇보다 약물이나 세포를 체내에 전달하는데 훨씬 효율적이고, 인체에 고통을 주지 않고 하는 비침습적 수술 등에 활용할 수 있을 것”이라고 말했다.
이번 연구 성과는 네이처지 자매지인 사이언티픽 리포트 29일자 온라인판에 게재됐다. 최 교수가 교신저자, 김상원 로봇공학전공 박사과정생이 제1저자로 참여했다.
정광진기자 kjcheong@hankookilbo.com